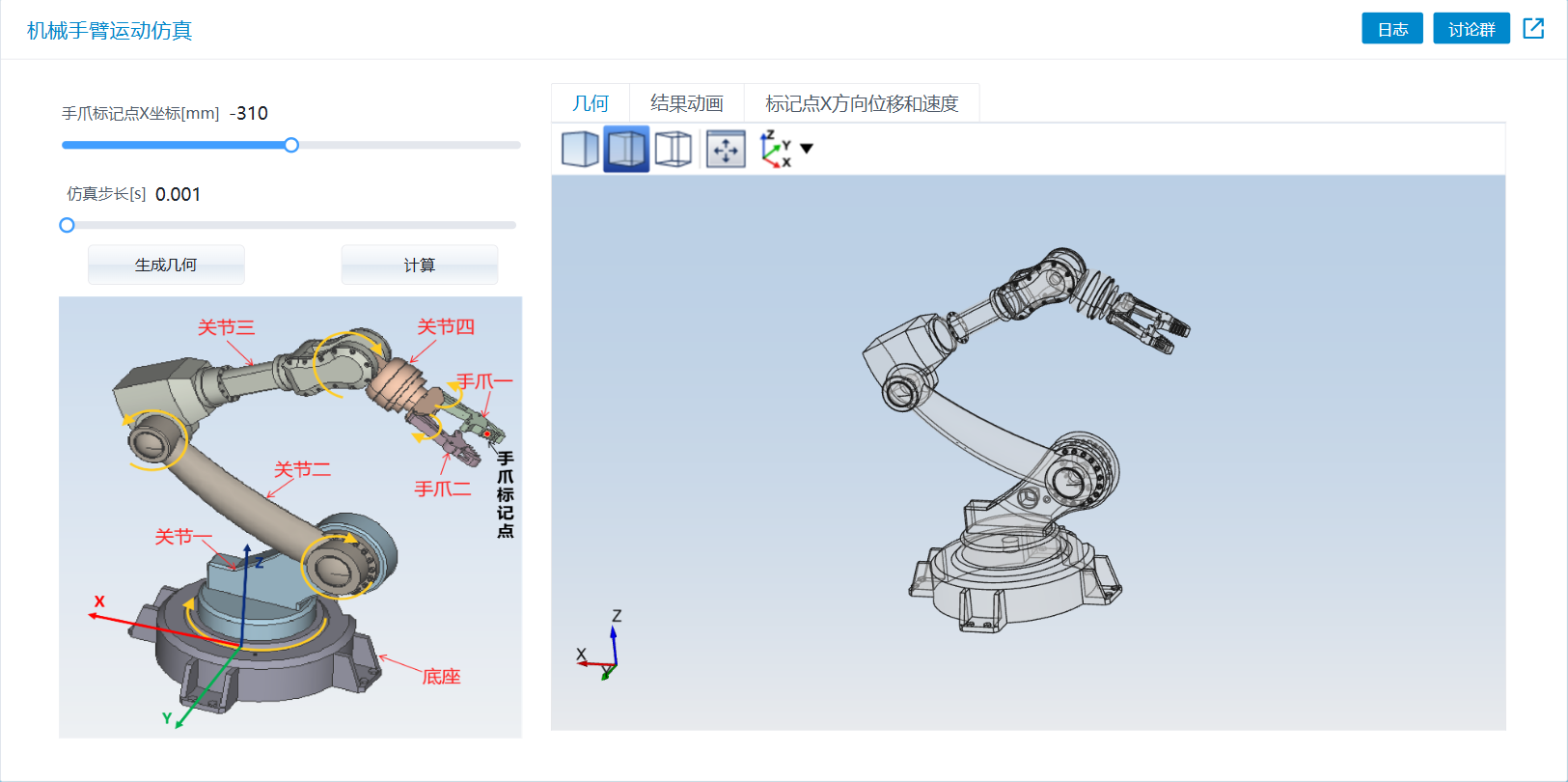
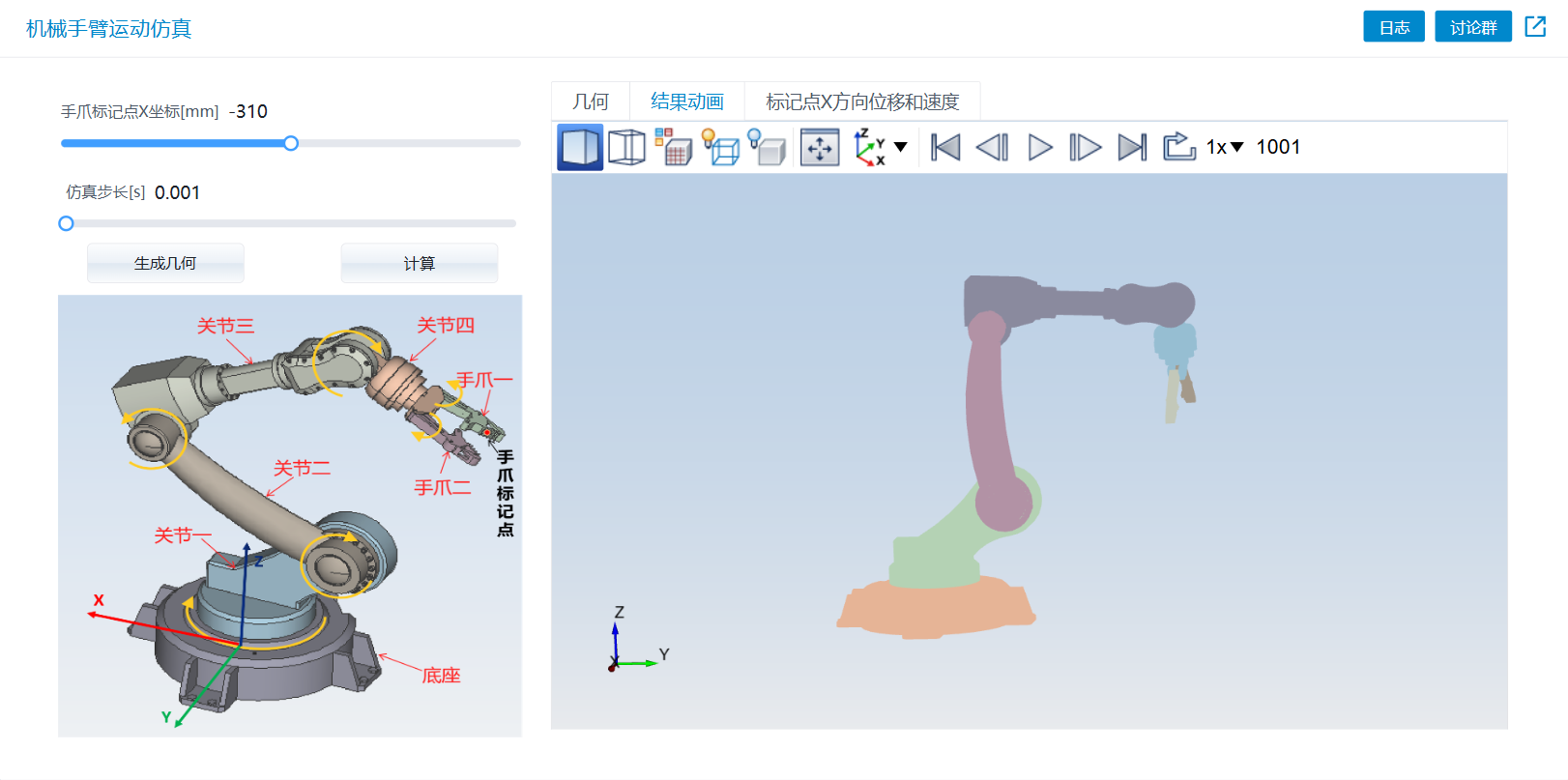
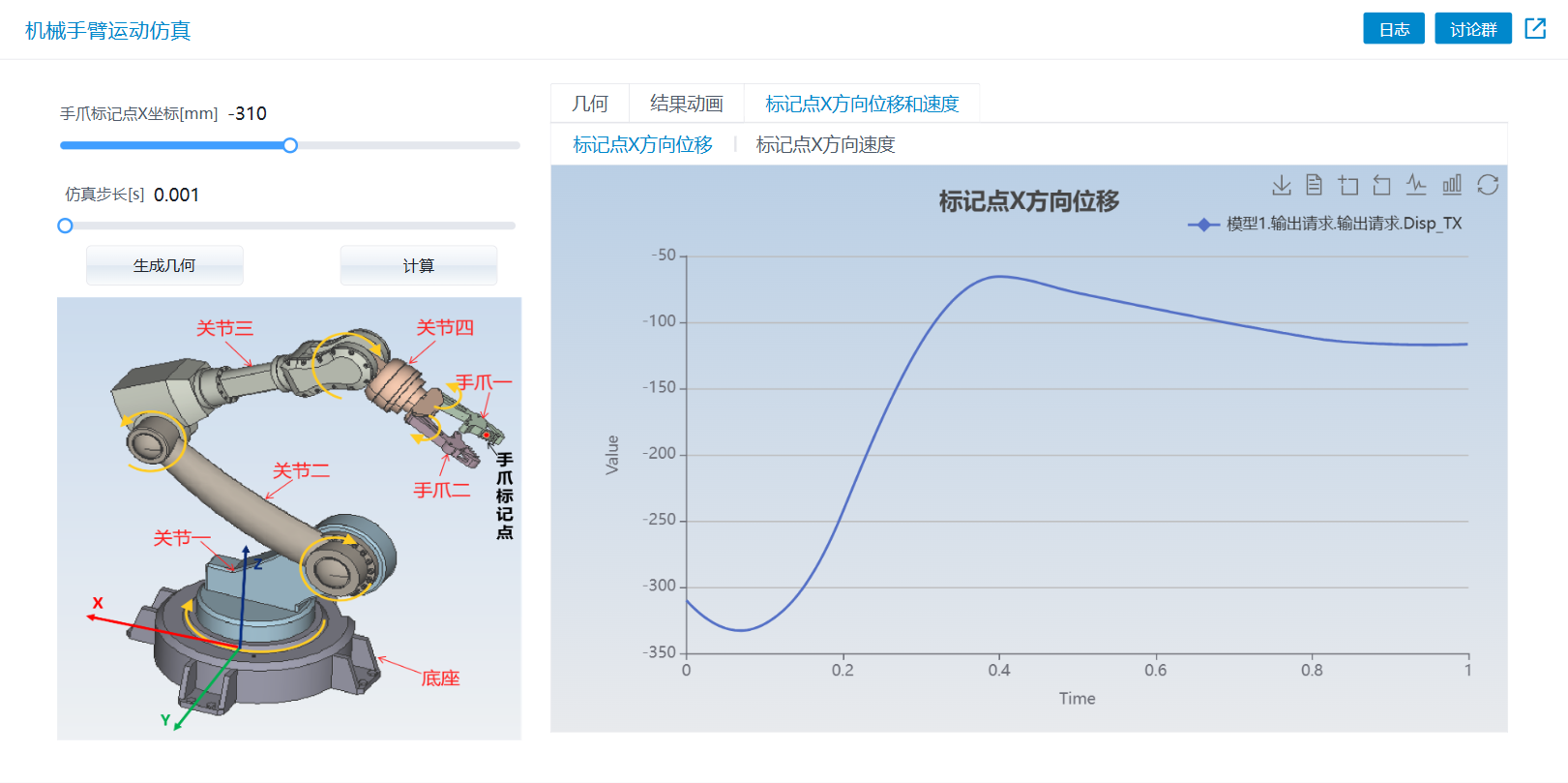
机械手臂是机器人技术领域中得到广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。本app建立了机械手臂多刚体动力学仿真模型,可模拟机械手臂各关节在指定工况下的运动姿态及末端执行器的运动轨迹,从而评估作业轨迹精度。
|
开发者
|
FLY_
|
|
物理场
|
多体动力学
|
|
版本
|
5.0R20240625
|
|
大小
|
2.45M
|
|
上传时间
|
2024-06-20
|
|
参考计算时间
|
00:00:40
|



{kind=link}